摘要:本文结合 RocketMQ 源码,分享并发编程三大神器的相关知识点。
本文分享自华为云社区《读 RocketMQ 源码,学习并发编程三大神器》,作者:勇哥java实战分享。
这篇文章,笔者结合 RocketMQ 源码,分享并发编程三大神器的相关知识点。
 1 CountDownLatch 实现网络同步请求
1 CountDownLatch 实现网络同步请求
CountDownLatch 是一个同步工具类,用来协调多个线程之间的同步,它能够使一个线程在等待另外一些线程完成各自工作之后,再继续执行。
下图是 CountDownLatch 的核心方法:
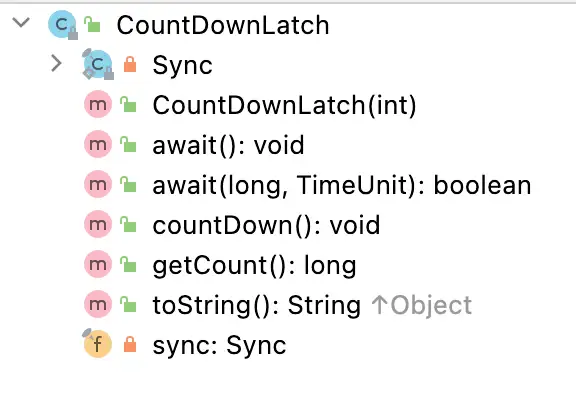
我们可以认为它内置一个计数器,构造函数初始化计数值。每当线程执行 countDown 方法,计数器的值就会减一,当计数器的值为 0 时,表示所有的任务都执行完成,然后在 CountDownLatch 上等待的线程就可以恢复执行接下来的任务。
举例,数据库有100万条数据需要处理,单线程执行比较慢,我们可以将任务分为5个批次,线程池按照每个批次执行,当5个批次整体执行完成后,打印出任务执行的时间 。
long start = System.currentTimeMillis(); ExecutorService executorService = Executors.newFixedThreadPool(10); int batchSize = 5; CountDownLatch countDownLatch = new CountDownLatch(batchSize); for (int i = 0; i < batchSize; i++) { final int batchNumber = i; executorService.execute(new Runnable() { @Override public void run() { try { doSomething(batchNumber); } catch (Exception e) { e.printStackTrace(); } finally { countDownLatch.countDown(); } } });}countDownLatch.await();System.out.println("任务执行耗时:" + (System.currentTimeMillis() - start) + "毫秒");
温习完 CountDownLatch 的知识点,回到 RocketMQ 源码。
笔者在没有接触网络编程之前,一直很疑惑,网络同步请求是如何实现的?
同步请求指:客户端线程发起调用后,需要在指定的超时时间内,等到响应结果,才能完成本次调用。如果超时时间内没有得到结果,那么会抛出超时异常。
RocketMQ 的同步发送消息接口见下图:
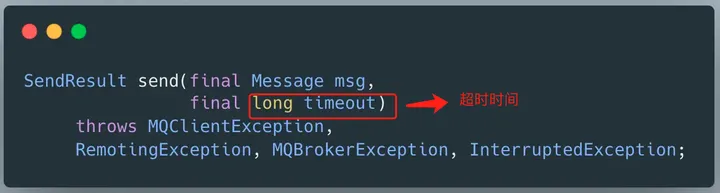
追踪源码,真正发送请求的方法是通讯模块的同步请求方法invokeSyncImpl。
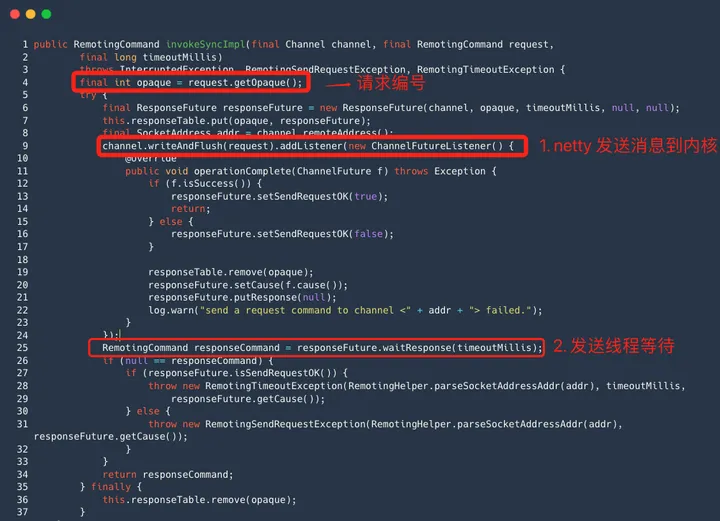
整体流程:
- 发送消息线程 Netty channel 对象调用 writeAndFlush 方法后 ,它的本质是通过 Netty 的读写线程将数据包发送到内核 , 这个过程本身就是异步的;
- ResponseFuture 类中内置一个 CountDownLatch 对象 ,responseFuture 对象调用 waitRepsone 方法,发送消息线程会阻塞 ;
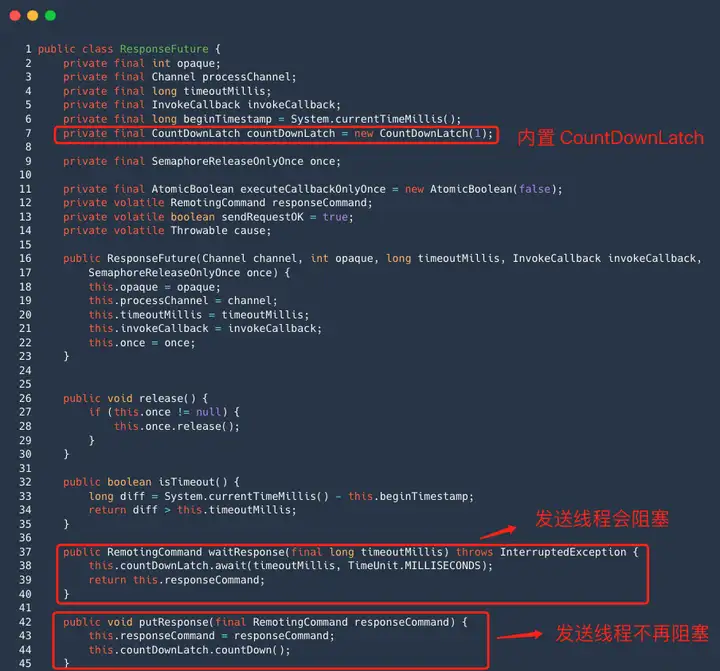
3.客户端收到响应命令后, 执行 processResponseCommand 方法,核心逻辑是执行 ResponseFuture 的 putResponse 方法。

该方法的本质就是填充响应对象,并调用 countDownLatch 的 countDown 方法 , 这样发送消息线程就不再阻塞。
CountDownLatch 实现网络同步请求是非常实用的技巧,在很多开源中间件里,比如 Metaq ,Xmemcached 都有类似的实现。
2 ReadWriteLock 名字服务路由管理
读写锁是一把锁分为两部分:读锁和写锁,其中读锁允许多个线程同时获得,而写锁则是互斥锁。
它的规则是:读读不互斥,读写互斥,写写互斥,适用于读多写少的业务场景。
我们一般都使用 ReentrantReadWriteLock ,该类实现了 ReadWriteLock 。ReadWriteLock 接口也很简单,其内部主要提供了两个方法,分别返回读锁和写锁 。
public interface ReadWriteLock { //获取读锁 Lock readLock(); //获取写锁 Lock writeLock();}
读写锁的使用方式如下所示:
1.创建 ReentrantReadWriteLock 对象 , 当使用 ReadWriteLock 的时候,并不是直接使用,而是获得其内部的读锁和写锁,然后分别调用 lock / unlock 方法 ;
private ReadWriteLock readWriteLock = new ReentrantReadWriteLock();
2.读取共享数据 ;
Lock readLock = readWriteLock.readLock();readLock.lock();try { // TODO 查询共享数据} finally { readLock.unlock();}
3.写入共享数据;
Lock writeLock = readWriteLock.writeLock();writeLock.lock();try { // TODO 修改共享数据} finally { writeLock.unlock();}
RocketMQ架构上主要分为四部分,如下图所示 :
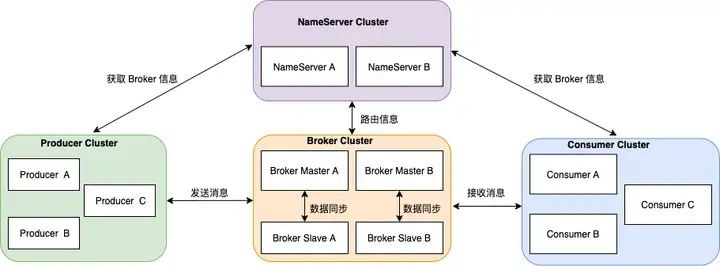
- Producer :消息发布的角色,Producer 通过 MQ 的负载均衡模块选择相应的 Broker 集群队列进行消息投递,投递的过程支持快速失败并且低延迟。
- Consumer :消息消费的角色,支持以 push 推,pull 拉两种模式对消息进行消费。
- BrokerServer :Broker主要负责消息的存储、投递和查询以及服务高可用保证。
- NameServer :名字服务是一个非常简单的 Topic 路由注册中心,其角色类似 Dubbo 中的zookeeper,支持Broker的动态注册与发现。
NameServer 是一个几乎无状态节点,可集群部署,节点之间无任何信息同步。Broker 启动之后会向所有 NameServer 定期(每 30s)发送心跳包(路由信息),NameServer 会定期扫描 Broker 存活列表,如果超过 120s 没有心跳则移除此 Broker 相关信息,代表下线。
那么 NameServer 如何保存路由信息呢?
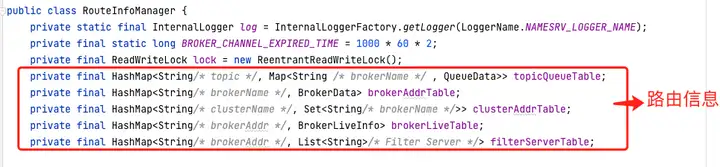
路由信息通过几个 HashMap 来保存,当 Broker 向 Nameserver 发送心跳包(路由信息),Nameserver 需要对 HashMap 进行数据更新,但我们都知道 HashMap 并不是线程安全的,高并发场景下,容易出现 CPU 100% 问题,所以更新 HashMap 时需要加锁,RocketMQ 使用了 JDK 的读写锁 ReentrantReadWriteLock 。
1.更新路由信息,操作写锁
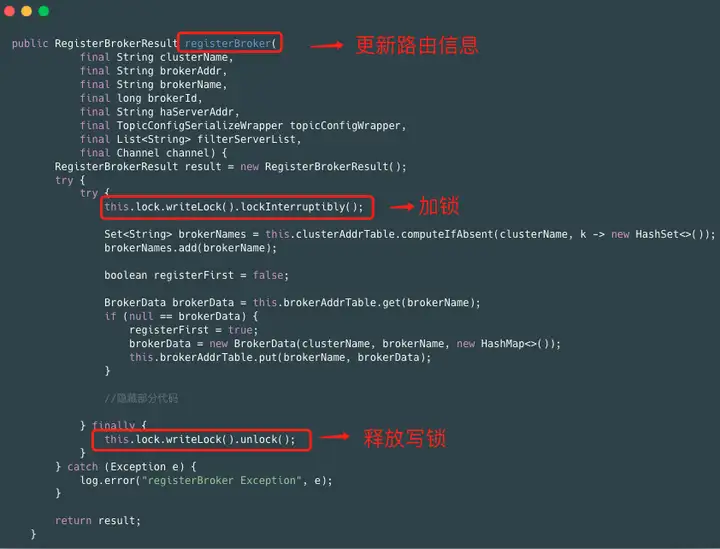
2.查询主题信息,操作读锁

读写锁适用于读多写少的场景,比如名字服务,配置服务等。
3 CompletableFuture 异步消息处理
RocketMQ 主从架构中,主节点与从节点之间数据同步/复制的方式有同步双写和异步复制两种模式。
异步复制是指消息在主节点落盘成功后就告诉客户端消息发送成功,无需等待消息从主节点复制到从节点,消息的复制由其他线程完成。
同步双写是指主节点将消息成功落盘后,需要等待从节点复制成功,再告诉客户端消息发送成功。
同步双写模式是阻塞的,笔者按照 RocketMQ 4.6.1 源码,整理出主节点处理一个发送消息的请求的时序图。
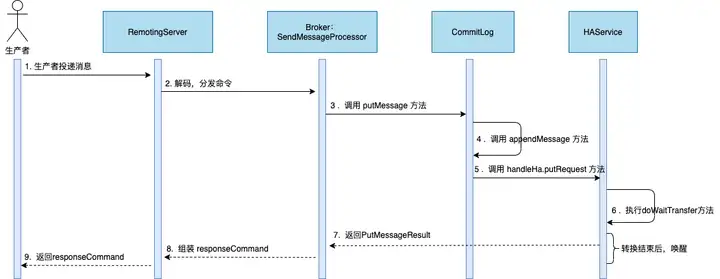
整体流程:
- 生产者将消息发送到 Broker , Broker 接收到消息后,发送消息处理器 SendMessageProcessor 的执行线程池SendMessageExecutor线程池来处理发送消息命令;
- 执行 ComitLog 的 putMessage 方法;
- ComitLog 内部先执行 appendMessage 方法;
- 然后提交一个 GroupCommitRequest 到同步复制服务 HAService ,等待 HAService 通知 GroupCommitRequest 完成;
- 返回写入结果并响应客户端 。
我们可以看到:发送消息的执行线程需要等待消息复制从节点 , 并将消息返回给生产者才能开始处理下一个消息。
RocketMQ 4.6.1 源码中,执行线程池的线程数量是 1 ,假如线程处理主从同步速度慢了,系统在这一瞬间无法处理新的发送消息请求,造成 CPU 资源无法被充分利用 , 同时系统的吞吐量也会降低。
那么优化同步双写呢 ?
从 RocketMQ 4.7 开始,RocketMQ 引入了 CompletableFuture 实现了异步消息处理。
- 发送消息的执行线程不再等待消息复制到从节点后再处理新的请求,而是提前生成CompletableFuture 并返回 ;
- HAService 中的线程在复制成功后,调用 CompletableFuture 的 complete 方法,通知 remoting 模块响应客户端(线程池:PutMessageExecutor ) 。
我们分析下 RocketMQ 4.9.4 核心代码:
1.Broker 接收到消息后,发送消息处理器 SendMessageProcessor 的执行线程池SendMessageExecutor线程池来处理发送消息命令;
2.调用 SendMessageProcessor 的 asyncProcessRequest 方法;

3.调用 Commitlog 的 aysncPutMessage 方法写入消息 ;
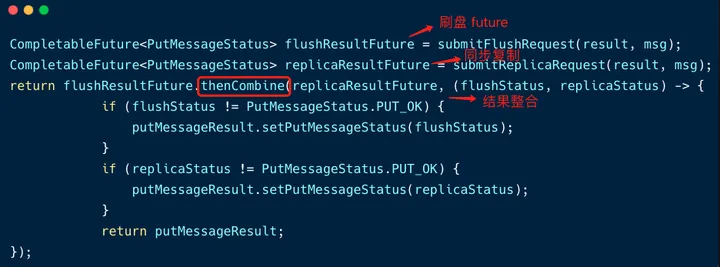
这段代码中,当 commitLog 执行完 appendMessage 后, 需要执行刷盘任务和同步复制两个任务。
但这两个任务并不是同步执行,而是异步的方式。
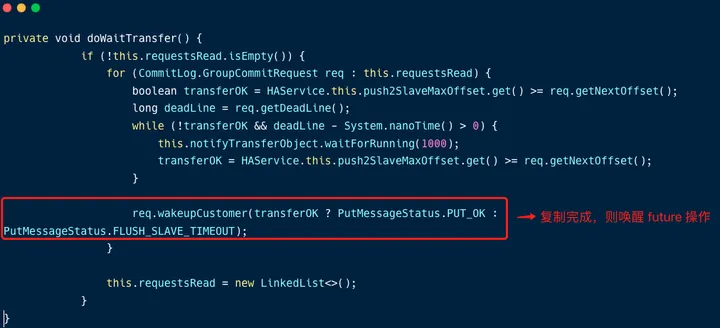
4.复制线程复制消息后,唤醒 future ;
5.组装响应命令 ,并将响应命令返回给客户端。
为了便于理解这一段消息发送处理过程的线程模型,笔者在 RocketMQ 源码中做了几处埋点,修改 Logback 的日志配置,发送一条普通的消息,观察服务端日志。
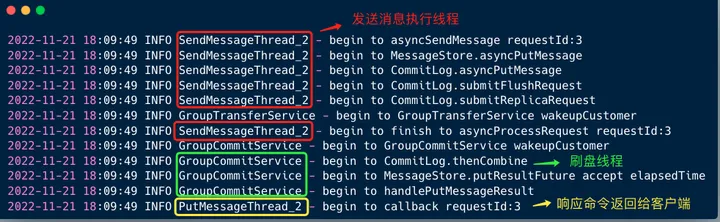
从日志中,我们可以观察到:
- 发送消息的执行线程(图中红色)在执行完创建刷盘 Future 和同步复制 future 之后,并没有等待这两个任务执行完成,而是在结束 asyncProcessRequest 方法后就可以处理发送消息请求了 ;
- 刷盘线程和复制线程执行完各自的任务后,唤醒 future,然后通过刷盘线程组装存储结果,最后通过 PutMessageExecutor 线程池(图中黄色)将响应命令返回给客户端。
笔者一直认为:异步是更细粒度的使用系统资源的一种方式,在异步消息处理的过程中,通过 CompletableFuture 这个神器,各个线程各司其职,优雅且高效的提升了 RocketMQ 的性能。
点击关注,第一时间了解华为云新鲜技术~